About the project
Objective
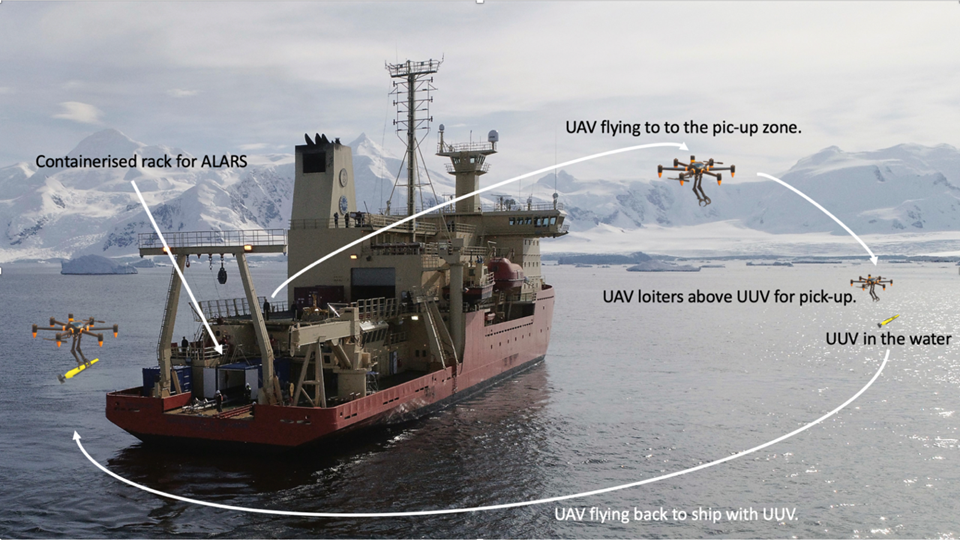
The ALARS project aims to drastically improve how Unmanned Underwater Vehicles (UUVs) are deployed and recovered in maritime operations. Currently, UUV launch and retrieval rely on manual, time-consuming, and high-risk methodsinvolving surface vessels and human intervention. ALARS introduces an autonomous aerial solution that integrates drone (UAV) technology with UUV operations, significantly enhancing efficiency, safety, and scalability in underwater missions.
Key features of ALARS:
- UAV-Based UUV Deployment – Autonomous drones will carry and release UUVs precisely at mission locations.
- Automated Recovery System – UAVs equipped with an advanced winch mechanism will retrieve UUVs from the water without requiring human intervention.
- AI-Powered Navigation & Stability Control – The system leverages machine learning algorithms for object detection and dynamic stability during deployment and retrieval.
- Multi-UUV Operations – ALARS supports the simultaneous launch and recovery of multiple UUVs, significantly boosting operational capacity.
By automating these processes, ALARS aims to reduce human risk, increase mission success rates, and unlock new capabilities in maritime security, environmental monitoring, and offshore industries.
Background
Modern UUV operations are essential for naval intelligence, surveillance, reconnaissance (ISR), environmental monitoring, and subsea exploration. However, traditional deployment and recovery methods rely on mothership-based handling, which presents multiple challenges:
- Operational inefficiency – Manual operations take time and limit real-time responses.
- Safety concerns – Harsh weather and ocean conditions pose risks to human operators.
- Limited scalability – Only one UUV can be deployed or retrieved at a time.
ALARS directly addresses these limitations by integrating aerial robotics with autonomous underwater systems, allowing for:
- Faster and more flexible UUV deployment and recovery.
- Reduced risk to human operators by eliminating manual handling.
- Multi-domain autonomy with real-time AI-powered decision-making.
By leveraging Sweden’s expertise in robotics, AI, and autonomous systems, ALARS sets a new global benchmark for efficient and safe maritime operations.
Crossdisciplinary collaboration
The ALARS project brings together experts in:
- Autonomous Underwater Systems – UUV development and deployment strategies (KTH, SMaRC)
- Artificial Intelligence & Machine Learning – AI-driven target detection and real-time decision-making (KTH)
- Maritime Defense & ISR Operations – Application-specific design for naval and offshore use cases (Saab Kockums)
The project is a collaboration between KTH, Saab Kockums, and SMaRC, with direct industry involvement to ensure real-world validation and future deployment.
Principal Investigators (PIs)
- Ivan Stenius (KTH, Project Lead)
- John Folkesson (KTH, AI & Machine Learning Integration)
- Petter Ögren (KTH, Multi-Agent Coordination and Control Systems)