
About the project
Objective
The overall objective is to develop and evaluate AI-based and classical optimization (mathematical programming) approaches for sensor placement and control, data processing, communication, and motion planning.
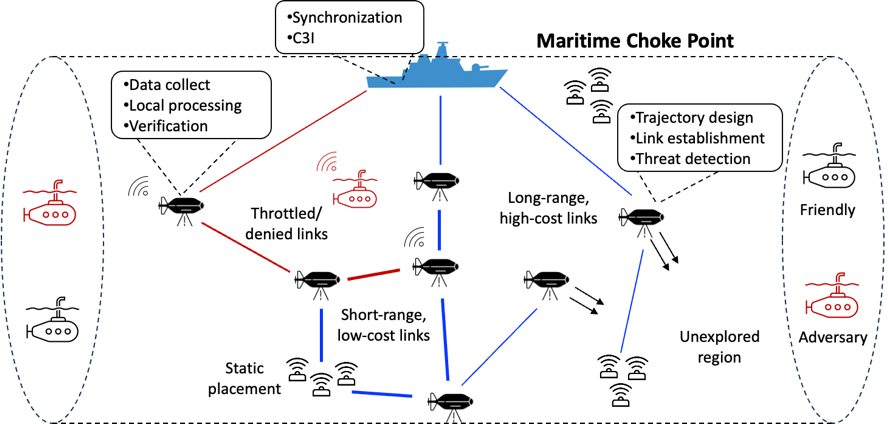
This project aims to develop novel algorithms and computational methods for optimal planning, deployment, and operations of a network of AUVs and sensors in undersea environments. These algorithms will focus on optimizing the placement of sensors and movement of AUVs across the region, paying attention to relevant objectives including coverage and communication robustness. They will also focus on processing locally collected AUV measurements (e.g., sonar data) for situational awareness tasks (e.g., the emergence of an adversarial threat). The project will consider classical model-based approaches, AI/ML approaches, and hybrid approaches to developing these algorithms, comparing and contrasting them under different environmental settings and dynamics.
Of particular interest in this project is coordinating sensors and fleets of autonomous underwater vehicles (AUVs) to patrol regions of the ocean. However, these settings pose unique challenges in placement/motion planning such as limited communication, computations, and data processing. The communication challenges are mainly dealt with in a second sub-project led by the researchers at Purdue University.
Background
Surveillance systems are becoming increasingly reliant on the ability of autonomous networked agents to conduct intelligence, surveillance, and reconnaissance (ISR) tasks. Much recent effort has been devoted to AI/ML-based approaches for augmenting such systems, though pinpointing exactly when AI/ML gives clear-cut advantages over traditional optimization and analytics-based is still an open question. Moreover, while many existing efforts in autonomy are focused on systems of drones, sensors, and other vehicles that operate above the surface, little attention has been paid to undersea ISR settings. The project focuses on the undersea setting, bringing together expertise from different fields, and forms a new line of collaboration between KTH, Purdue University, and Saab.
Crossdisciplinary collaboration
This project is part of a larger collaboration between Saab, KTH, and Purdue University. The project focuses on developing novel algorithms and computational methods for, planning, deploying, controlling, and operating a network of AUVs and different types of sensors over contested undersea environments.
The project brings together expertise from Applied Mathematics, Optimization, Electrical Engineering, and expertise in Underwater Environments.
Participating in the project:
- PhD student at KTH (recruitment ongoing)
- Jan Kronqvist, KTH, PI
- Roger Berg, Saab, PI
- Per Enqvist, KTH, co-PI
Collaborators in the larger project:
- Christopher Brinton, PI, Purdue University
- Shreyas Sundaram, co-PI, Purdue University
