
About the project
Objective
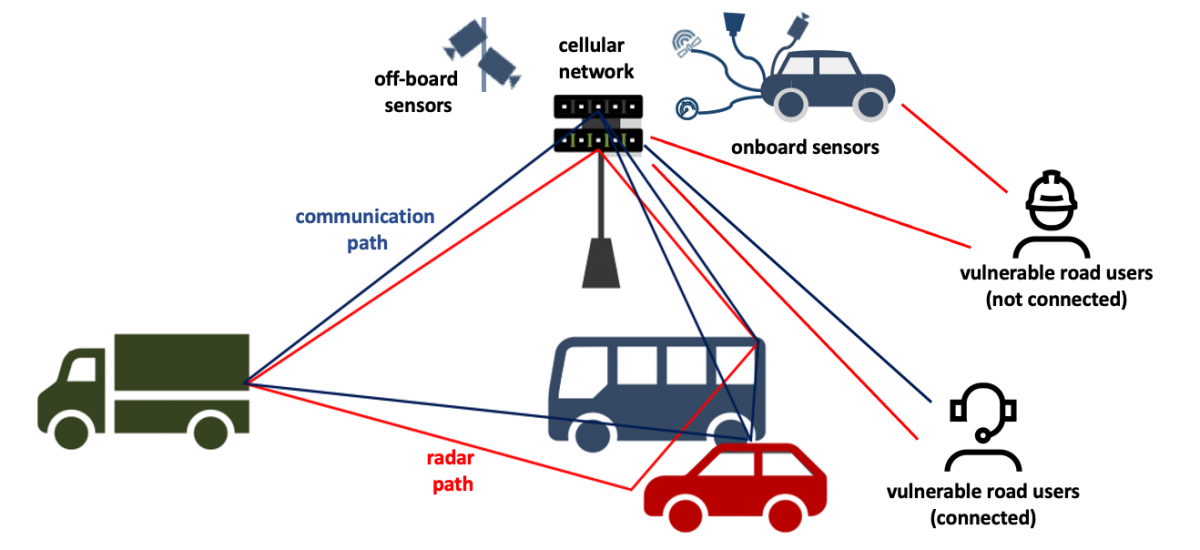
The PERCy project aims to develop a reference architecture, procedures and algorithms that facilitate advanced driver assistance systems and ultimately fully automated driving by fusing data provided by onboard sensors, off-board sensors and, when available, sensory data acquired by cellular network sensing. The fused data is then exploited for safety-critical tasks such as manoeuvring highly automated vehicles in public, open areas. This framework is motivated by the key observation that off-board sensors and information sharing extend the safe operational design domain achieved when relying solely on on-board sensors, thus promising to achieve a highly improved performance-safety balance.
Background
Advanced driver assistance systems – such as adaptive cruise control, autonomous emergency braking, blind-spot assist, lane keep assist, and vulnerable road user detection – are increasingly deployed since they increase traffic safety and driving convenience. These systems’ functional safety and general dependability depend critically on onboard sensors and associated signal-processing capabilities. Since advanced driver assistance systems directly impact the driver’s reactions and the vehicle’s dynamics and can cause new hazards and accidents if they malfunction, they must comply with safety requirements. The safety relevance of onboard sensors is even higher in the case of highly automated driving, where the human driver does not supervise the driving operation. However, current standards and methodologies provide little guidance for collaborative systems, leading to many open research questions.
Crossdisciplinary collaboration
This project is a collaboration between KTH, Ericsson and Scania.




